Derive the equations of motion for the system
Mechanical Engineering
Consider the mass M subject to periodic forcing P(t) = P sin ωt + ε sin ω2t, where ε is a small parameter. The mass is attached to a spring with stiffness k and dashpot with damping coefficient c to model the stiffness and damping of the structure. Resting atop the idealized structure is vibration damper consisting of a mass ma, spring ka, and dashpot ca. as shown in Figure. The goal is to make the appropriate choice of the parameters ma, ka, ca to minimize the oscillations of the main structure. For consistency, make use of the following notation;
ωa = √(ka/ma), ωπ = √(k/M) and β = ω/ωπ, β2 = ω2/ωπ
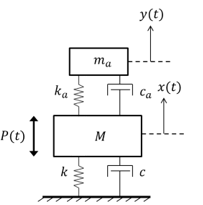
Figure – Schematic diagram of the idealized model for the mass M and vibration absorber.
Questions-
1. Derive the equations of motion for the system.
2. Derive the associated transfer functions.
3. CASE I: Consider the special case with ca = 0. Let M = 1kg, c = 3N/(m/s), k = 2 N/m, ma = 0.05kg and ω1 = 1, ω2 = 0 rad/s. How will you choose Ica to completely eliminate the oscillations of the structure?
4. CASE II: Add damping ca = 0.3N/(m/s) to the vibration absorber in CASE I. What happens when i) ωa = 0.5 ωn, ii) ωa = ωn, iii) ωa = 2ωn?
5. CASE III: Let ε/P = 0.01 be a small number. This corresponds to the case where the external force has a small perturbation with frequency ω2. How does the inclusion of this force affect the design of your vibration damper in CASES I and II?
